
Page 64 - Стасишин Дисертація
P. 64
64
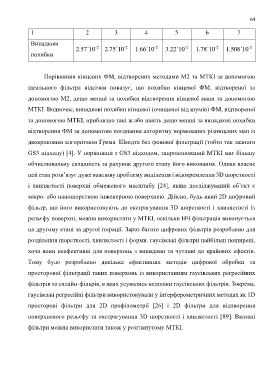
1 2 3 4 5 6 7
Випадкові
-2
-2
-2
-2
-2
-2
2.57´10 2.75´10 1.66´10 3.22´10 1.78´10 1.508´10
похибки
Порівняння кінцевих ФМ, відтворених методами М2 та МТКІ за допомогою
ідеального фільтра відсічки показує, що похибки кінцевої ФМ, відтвореної за
допомогою М2, дещо менші за похибки відтворення кінцевої мапи за допомогою
МТКІ. Водночас, випадкові похибки кінцевої (очищеної від шумів) ФМ, відтвореної
за допомогою МТКІ, приблизно такі ж або навіть дещо менші за випадкові похибки
відтворення ФМ за допомогою поєднання алгоритму нормованих різницевих мап із
двокроковим алгоритмом Грема–Шмідта без фонової фільтрації (тобто так званого
GS3 підходу) [4]. У порівнянні з GS3 підходом, запропонований МТКІ має більшу
обчислювальну складність за рахунок другого етапу його виконання. Однак власне
цей етап розв’язує дуже важливу проблему виділення і відокремлення 3D шорсткості
і хвилястості поверхні обмеженого масштабу [24], якщо досліджуваний об’єкт є
мікро- або наношорсткою інженерною поверхнею. Дійсно, будь-який 2D цифровий
фільтр, що його використовують до екстрагування 3D шорсткості і хвилястості із
рельєфу поверхні, можна використати у МТКІ, оскільки НЧ фільтрація виконується
на другому етапі за другої ітерації. Зараз багато цифрових фільтрів розроблено для
розділення шорсткості, хвилястості і форми. гаусівські фільтри найбільш поширені,
хоча вони неефективні для поверхонь з викидами та чутливі до крайових ефектів.
Тому було розроблено декілька ефективних методів цифрової обробки та
просторової фільтрації таких поверхонь із використанням гаусівських регресійних
фільтрів та сплайн-фільрів, в яких усувались недоліки гаусівських фільтрів. Зокрема,
гаусівські регресійні фільтри використовували у інтерферометричних методах як 1D
просторові фільтри для 2D профілометрії [26] і 2D фільтри для відтворення
поверхневого рельєфу та екстрагування 3D шорсткості і хвилястості [89]. Вказані
фільтри можна використати також у розглянутому МТКІ.