
Page 219 - КЛАСИФІКАЦІЯ ЛОКАЛІЗОВАНИХ ДЕФЕКТІВ ЗВАРНИХ ШВІВ НА РЕНТГЕНІВСЬКИХ ЗОБРАЖЕННЯХ ТРУБ
P. 219
219
складається з n пікселів вибирають як найкращу за всіма можливими
підвибірками довжиною (n+1)/2:
arg min {d ( , ); c 1 ,...,C n 1 2/ }, (5.1)
c c c n
де – коефіцієнт регресії, що відповідає підмножині ; d(.) - функція
c c
похибки коефіцієнтів поліноміальної регресії.
Під час побудови піраміди зображень використовуємо процедуру
усереднення чотирьох сусідніх пікселів. Функція інформативності
R {g k i , ( j )} G B k i , ( j ) G O k , (i ) j . (5.2)
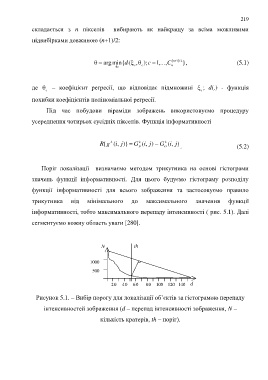
Поріг локалізації визначаємо методом трикутника на основі гістограми
значень функції інформативності. Для цього будуємо гістограму розподілу
функції інформативності для всього зображення та застосовуємо правило
трикутника від мінімального до максимального значення функції
інформативності, тобто максимального перепаду інтенсивності ( рис. 5.1). Далі
сегментуємо кожну область уваги [280].
N th
1000
500
20 40 60 80 100 120 140 d
Рисунок 5.1. ‒ Вибір порогу для локалізації об’єктів за гістограмою перепаду
інтенсивностей зображення (d – перепад інтенсивності зображення, N –
кількість кратерів, th – поріг).